[How do motor companies grasp the development trend of the automotive market to strive for technical oversampling? 】 The motor technology is not as simple as we imagine. The domestic manufacturers of permanent magnet synchronous motors for vehicles lag behind in foreign countries for about five years. The difference lies in the design concept, raw materials and equipment, and the need to avoid foreign patents. Copies). In addition, there are gaps in the control of material loss, process, and key parameters, and the speed of product renewal is also slow. Future trends in motor products are higher output density, wider speed range, lower manufacturing costs, and easier integration (the most significant integration at the moment is the integration of motors, transmissions, and controllers). Companies that can make breakthroughs in technology and customer response in the future are expected to win.
First, the motor magnetic field and working principle
Electromagnetic force principle: Electromagnetic force refers to the energized wire in the magnetic field by the role of electromagnetic force, the electromagnetic force is the opposite sex attract, same-sex repulsion. The opposite sex attracts here certainly is right, but the homosexuality repulses here the same sex refers to not the same polarity, but refers to the electromagnetic magnetic field nature is the same. The current generation of motors is mainly due to suction.
The principle of power generation: The conductor is induced in the magnetic field that generates the voltage, so that the circuit forms a loop to generate the current.
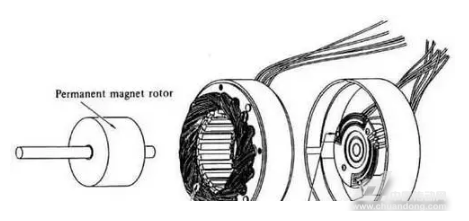
The working principle of the permanent magnet synchronous motor: The stator generates a rotating magnetic field after alternating current. The rotating magnetic field attracts the magnetic field of the rotor, which is the rotation of the rotor following the stator magnetic field.
It should be noted here that most of the motors used in the vehicle are permanent magnet synchronous motors, and most of them are built-in synchronous motors. The main reason is that inline synchronous motors make good use of reluctance torque. The effect of the reluctance torque on the motor system is:
In the same motor anti-potential system, achieving the same torque can reduce the release of the current, which helps to improve the efficiency of the motor under low speed and high torque conditions, and also creates conditions for reducing the cost of the main components of the controller.
Under the same controller hardware conditions, a high reluctance torque motor has a higher idle speed than a low reluctance torque motor, which helps to improve the motor's high-speed and low-torque work efficiency, improve electromagnetic noise, and improve the speed of the motor system. range.
Second, the main performance parameters of the vehicle drive motor and interpretation
Measuring the main performance of the drive motor for vehicles mainly depends on the following data:
1. Minimum operating voltage at full power output: (Rated voltage is not important) It should be noted here that the motor used in the vehicle is AC, but the data generally given by the manufacturer is DC. The data needs to be converted into AC. DC is converted into AC. When passing through the controller, this step consumes a portion of the voltage.
2. The maximum working phase current: Can not use the data provided by the host plant, to combine the IGBT capability of the controller.
3. Peak torque: It is possible for a commercial vehicle customer to have a locked-rotor torque value.
4. Peak power: What should be the peak power at speed.
5. Rated power/torque: The operating point allowed to run for a long time is called rated power, but the reasonable rated power should be continuous torque and power for the entire vehicle manufacturer. For example, the motor running power at high speed can be used as the rated power. Consider the rated power at the sewing speed.
6. Maximum working speed: The maximum working speed includes the power at the highest working speed, the back electromotive force at the highest speed, and the mechanical stress at the highest speed (is it stable operation at high speed).
7. NVH: Low Cogging Torque and Negative Back-EMF Spectral Waves.
8. Efficiency: The data that needs attention here is the most commonly used efficiency of the motor. At the same time, we must also pay attention to the efficient matching of the needs of the customer's needs.
Third, the development trend
1. Higher output density - (big as big output 200kw)
Is there any material, low cost and high efficiency?
2. More wide speed range (0-18000 rpm, even 0-20000 rpm)
Is there any new principle that can reduce costs?
3. Lower manufacturing costs
New process (for example, there is no good insulation material can increase the temperature resistance)
4. easier to integrate
New application (currently the most significant integration is motor, transmission and controller together)
Fourth, IPMSM magnetic circuit structure
1 commonly used magnetic circuit structure
2. Development trend of magnetic circuit structure of permanent magnet synchronous motor for vehicle
The trend is mainly summarized as: high power density, low material loss, high-speed rotation, and flexible control. Specifically:
Adapt to high reluctance torque performance and low magnet consumption
Meet the needs of integration of motors and gearboxes, and pursue rotor size and thin design
Development of New Magnetic Steel Process or High Performance Silicon Steel Sheet Material
Catering to innovative control strategies to transform the special requirements of motor magnetic circuit parameters
V. Permanent magnet synchronous motor related design parameters and values
1.I,P,Z,n values ​​(the most relevant parameters for motor design)
a) pole pair p
The more pole pairs, the more conducive to improving the motor torque density and power density
Without considering the rotor flux leakage, the more pole pairs of the motor, the weaker the armature reacts to the armature of the rotor.
Considering the actual process capability and the mechanical strength of the rotor, excessive pole pairs can lead to excessive drain coefficients, and the armature slot area of ​​the shrink-match is too small, which is not conducive to the improvement of power density.
The pole pair number determines the operating frequency of the motor at a certain speed. Therefore, the maximum number of pole pairs allowed by the motor can be obtained according to the ability of the motor lock to match the switching components of the controller and the maximum speed of the motor lock.
Priority recommendation: Meet motor controllability - meet motor manufacturability - take as many poles as possible.
b) Index Z (Generally, p must be decided before Z)
(Concept: Each group of slots per phase Q = Z / (3 * 2 * P), Q is an integer when the integer slot winding is called, otherwise it is called fractional slot winding)
If a high-power motor used in a vehicle has a concentrated winding, then the motor's Q = 0.5, then the number of slots Z = 3 * P, there are a small number of small-power motor 8 9 slot or 10 12 slots.
The larger the Q value, the smaller the back-EMF spectral wave of the motor, the smaller the cogging torque and torque ripple of the motor, but according to the experience Q>3, the improvement of the spectral wave can be ignored.
Since the power of the drive motor is large, and the number of motor single-phase series turns is small, many times the number of appropriate slots Z needs to be selected to ensure a reasonable number of motor turns.
The commonly used Q value of the motor is recommended as follows: Q=0.5; Q=1.5; Q=2; Q=2.5; Q=3 (The flat copper wire winding process is often used when the vehicle drive motor Q takes a large value.
C) Number of turns N
As the number of turns increases, the back EMF of the motor increases and the torque at the same current increases.
The increase in the number of turns means that the cross-sectional area of ​​the conductor is reduced, which may lead to excessive heat load on the armature.
Changing the volume of the motor changes the flux area of ​​the motor. Changing the structure of the magnetic circuit can change the air gap magnetostrictive polar arc coefficient and create conditions for adjusting the number of motor turns.
2. The main size is determined
1) Armature outer diameter value
Under normal circumstances, according to the size requirements of the vehicle, the thickness of the outer shell is removed to obtain the outer diameter of the stator core, and the thickness of the motor casing varies with the size of the motor and the shell process. In recent years, more and more widely used integrated Water-cooled enclosure, the thickness of its enclosure is recommended to be between 18 and 30mm
2) Armature inner diameter value
Definition: After determining the outer diameter of the stator, the inner diameter dimension of the armature can be determined. That is, the key is to design the motor's inner and outer diameter ratio kd.
Influence: The greater the Kd value is, the smaller the influence of the armature magnetic potential of the motor is. However, the magnetic flux of the rotor increases, the magnetic potential of the rotor increases, and it is easy to increase the power capability of the motor. However, the copper loss of the motor needs to be increased. Otherwise, the motor will be reduced. Power capability, but it can create conditions for improving motor efficiency. The Kd value also affects the size and shape of the armature slot. The smaller the Kd value, the deeper the slot, the smaller the armature slot and the increased slot leakage resistance.
3) Selection of motor stator and rotor air gap
The smaller the air gap, the better the performance of the motor, but the electric noise also likes the problem of too small. Too small gaps require too high parts assembly accuracy, and can not adapt to the centrifugal force deformation of the rotor at high speed, so the motor should How small the size can be depends mainly on the relevant process level and deformation of the rotor at high speeds.
3. Magnetic density
a) Relation between magnetic flux density and magnetic flux density
Electromagnetic force: F=BIL
Electromagnetic torque: Te=BINLfeR=BJV
The torque density of a motor depends on the magnetic flux density of the load in the air gap of the motor and the current density of the conductor in the stator.
b) There are two ways for the motor to obtain a higher magnetic flux density:
High magnetic force (increases magnetic field strength)
Higher current density (improved magnetic permeability of material)
C) The problem of empty and load magnetic density
No-load: Under the premise of satisfying the magnitude of back electromotive force, it is recommended to take a lower idle stator magnetism and a reasonable rotor magnetic flux density.
Peak load:
Properly adjust the ratio of AC and DC current distribution of the motor to relieve the saturation of the magnetic circuit without substantially sacrificing the motor torque.
Most of the rotors are saturated, but the saturation of the magnetic circuit due to armature leakage reactance should be minimized through magnetic circuit optimization.
4. Back-EMF value
a) Influence of Back EMF on Motors and Controllers
Under certain conditions of the operating current of the motor, the output torque of the motor is proportional to the back electromotive force of the motor. At the same output torque, increasing the back EMF of the motor can reduce the operating current of the motor
When the motor is not working with weak magnetic field, the working speed of the motor is inversely proportional to the back electromotive force when the motor voltage is fixed. For the synchronous motor control, the magnitude of the back electromotive force basically determines the inflection point of the motor peak torque.
The highest back-EMF threatens the safety of the controller's main components (capacitors and IGBTs). Excessive back-EMF may lead to device damage.
b) The value of back electromotive force
In general, existing thin film capacitors in the market can withstand a back-EMF of less than 500V. For custom-made devices with a power supply of about 300V, the value is generally less than 700V. In reality, the value exceeds 650V. The thin film capacitor will be broken regardless of whether it is working or not. So many factories require a value of less than 450v.
Six, permanent magnet synchronous motor simulation means
1. The main problems that cause performance and measured data deviations are:
A. Incomplete material definition
B. Actual size deviation
C. Underestimation of material performance margin
D. Deviation from model equivalents
E. Deviations caused by unreasonable network division
F. Improper processing of simulation data
2. Considerations for simulation conditions:
A. Material properties
B. Change value of iron loss table affected by actual process
C. Grid (a lot of software is automatically divided)
D. Mechanics solver (understanding of MAXWELL force and virtual power)
LD/LQ calculation and judgment
General rule: Ld increases with weak magnetic acceleration and torque of the motor, and the value does not change basically. Lq decreases with increasing torque (or saturation with magnetic saturation) and increases with increasing speed (decrease in magnetic density)
When the motor is controlled by FOC, the quadrature-axis current of the motor is loaded at the same time. Under the magnetic path of the same stator and rotor, the magnetic circuit of the cross-axis is related to the influence. The simulation solution and loading conditions must be the same.
Seven, permanent magnet synchronous motor design output parameters
In the design of permanent magnet synchronous motors, the following data must be counted:
Back EMF or no-load flux linkage (many data with temperature changes)
Short-circuit current (stable value equal to no-load flux linkage/Ld)
Maximum phase current and maximum operating current frequency (consistent with controller IGBT)
Ld/lq table (corresponding to ID/Iq, two to be added at the same time)
Load characteristics (especially peak wheelbase, relationship between direct current and short-circuit current at power)
Cogging torque
0N.m The minimum phase current required for the maximum rotational speed and magnetic flux density distribution (very important, the high speed of the electric vehicle is required to be weakly magnetically weak, so the smaller the data, the more energy will be saved, and the less the number of battery installations).
Efficiency MAP
Current density and thermal load judgment
Slot full rate
Winding end size
The Cutting Machine is a product developed for Cutting TPU Protective Films, Hydrogel Screen Protective Films and PVC Back Stickers.
Advantages of Cutting Machine:
1. "0" inventory, no need to worry about large inventory.
2. Compatible with "99%" 20000+ mobile phones, watches, tablets, etc.
3. According to needs-customize the Protective Film that customers want at any time.
4. Will not lose sales opportunities due to shortages.
5. Save product packaging and transportation costs.
6. Say goodbye to the losses caused by unsold old inventory.
7. No need to spend time and energy to find various types of products.
8. Selling new products for the first time.
9. Different styles of Protective Film can be customized.
10. Simple operation, align and paste it on the device, just one step.
11. Green environmental protection, reduce packaging, reduce waste and reduce costs.
12. To meet the needs of more customers.
13. Add value and increase sales for mobile phone stores, offline stores, and value-added services.
14. Exclusive policy, regional guarantee, first come first served.
15. Lead opponents, lead the market, and seize opportunities.
16. Regain retail market share and create higher value space.
17. New generation mobile internet Mobile Phone Protective Film customization system.
18. Quickly start the business model and start the retail business easily.
Hydrogel Cutting Machine, Mobile Phone Screen Protector Cutting Machine, Hydrogel Film Cutting Machine, Hydrogel Protective Film Cutting Machine, Hydrogel Machine
Shenzhen Jianjiantong Technology Co., Ltd. , https://www.jjttpucuttingplotter.com