In order to solve the problem of urban traffic congestion, it is necessary to take measures from two aspects of supply and demand: one is to strengthen the infrastructure construction of urban roads, and the other is to make full use of and improve the utilization efficiency of existing road networks. At present, most of the urban traffic lights in China use a fixed green signal ratio (the ratio of the effective green light duration of a signal phase to the period of time), which cannot meet the time-varying requirements of vehicles at intersections.
As one of the important branches of intelligent control, fuzzy control technology is the most widely used multi-variable complex system with nonlinear, strong coupling, uncertainty and time-varying. It is widely used in various control fields. Get good control results. There are a large number of plane intersections in urban roads. Intersections can generally be divided into cross-shaped, X-shaped, T-row, Y-row and multi-channel cross-shaped. This paper takes cross-shaped intersection as the research object.
The right of passage obtained by a certain branch or several traffic flows at a plane intersection is called a signal right, referred to as phase. There are several signal phases in a cycle, and the signal system is said to be a phase system. This article takes a two-way 6-lane 4-phase system as an example. The first phase is east-west traffic flow straight, the second phase east-west traffic flows left, the third phase north-south traffic flows straight, the fourth phase north-south traffic flows left, and all right-turn traffic is not controlled. Its traffic operation diagram is shown in Figure 1.
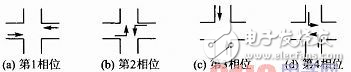
Figure 1 4 phase traffic operation diagram
2 Fuzzy controller designThe fuzzy controller usually includes a fuzzification interface, a database, a rule base, a fuzzy inference engine, and a defuzzification interface 5, as shown in FIG. 2.

Figure 2 The composition of the fuzzy controller
2.1 membership functionIn order to complete the fuzzification of the input, it is necessary to know the membership function of the input exact value pair to the fuzzification, such as taking seven, ie PL (Positive), PM (Center), PS (Positive), ZE (Zero), NS (Negative Small), NM (negative), NL (negative). In the case of high accuracy requirements, a normal distribution can be used. In general, a triangle or a trapezoid can be used. In this paper, a membership function of a triangle is used.
During the red light period, the coil induction is taken as 100 m, the average distance between the body and the vehicle is 5 m, and the measured vehicle queue length P is regarded as a fuzzy variable. Its domain is:
P={1,3,5,7,9,11,13,15,17,19,21}
Take 7 language values, the assignment table is listed in Table 1.
Table 1 P assignment table
The difference Q between the current phase fleet length and the fleet length of the next phase is used as a correction for the green light delay. Its domain is:
Q={-12,-9,-6,3,0,3,6,9,12}
Take 7 language values, the assignment table is listed in Table 2.
Table 2 Q assignment table
Under normal circumstances, in order to avoid the vehicle from passing, the green time is not less than 20 s; in order to avoid the vehicle waiting too long, the green time does not exceed 60 s. The additional time of the green light is regarded as the blur amount g. The total additional time domain is:
T={4,8,12,16,20,24,28,32,36}
Take 7 language values, the assignment table is listed in Table 3.
Table 3 T assignment table
2.2 Vehicle detectorThe toroidal coil type is used, and the metal coil is buried in the ground to form an LC oscillation circuit. Due to the influence of the ferromagnetic material of the body, the inductance changes, and the pulse of the vehicle passing through is known according to the inductance, thereby calculating the frequency of the vehicle passing.
2.3 Controller design In this paper, a two-dimensional fuzzy controller is used. Two-dimensional means that there are two input variables of the fuzzy controller, and only one output of the controller. The general form of such fuzzy rules is:
IF X1 IS Ai AND X2 IS Bi THEN Y IS Ci
A fuzzy control rule table is obtained by the control rules, as listed in Table 4.
Table 4 Fuzzy Control Rule Table
3 Fuzzy Control FPGA Implementation 3.1 Introduction to Spartan3A/3ANFPGA has the advantages of good performance, large scale, reprogrammable, and small investment in development. It is widely used in modern electronic products. ISE is a must-have design tool when using Xilinx's Spartan3A/3AN FPGAs. It can complete all the development process, including design input, simulation, synthesis, place and route, generate BIT download files, configuration and online debugging [4]. This paper uses EElements ISE Development Kit development kit and ISE10.1 software design tool to establish fuzzy control traffic light system project, as shown in Figure 3.
Figure 3 Fuzzy control traffic light system engineering drawing
Marine Overflow Observation Alarm
The utility model has a simple structure. When the tank overflows, the overflow medium flows into the oil tank through the oil inlet pipe, and flows into the lower part of the oil tank through the gap between the baffle plate and the oil tank. When the overflow medium is higher than the oil inlet of the oil overflow pipe, When the float floats, the float signal switch on the alarm is triggered to realize the overflow alarm.
marine overflow observation alarm,marine overflow observation alarm price,overflow observation alarm
Taizhou Jiabo Instrument Technology Co., Ltd. , https://www.taizhoujiabo.com