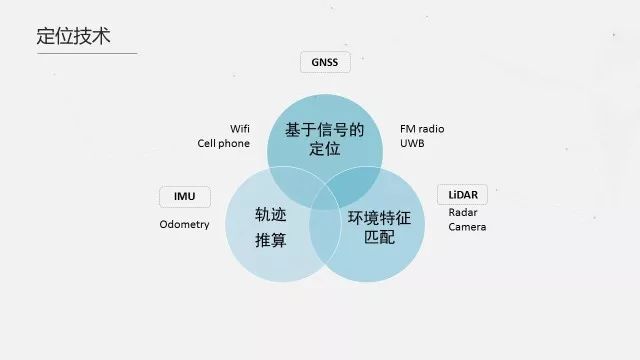
According to different positioning technology principles can be divided into three categories. The first category, based on the positioning of signals, represents GNSS positioning, ie global navigation satellite systems; the second category, path derivation, relying on IMU, etc., infers the current position and orientation based on the position and orientation of the previous moment; It is the matching of environmental features, based on LiDAR positioning, matching the observed features with features in the database and stored features to obtain the current car's position and posture.
Why do people need a high-precision positioning system?
For unmanned driving, position and attitude are used for path planning and vehicle control, and a highly accurate and robust positioning system is crucial. Let's first look at different types of location. Take Baidu Apollo's multisensor fusion location as an example. It contains three types of location technologies:
Three types of positioning and positioning techniques for smart driving
According to different positioning technology principles can be divided into three categories. The first category, based on the positioning of signals, represents GNSS positioning, ie global navigation satellite systems; the second category, path derivation, relying on IMU, etc., infers the current position and orientation based on the position and orientation of the previous moment; It is the matching of environmental features, based on LiDAR positioning, matching the observed features with features in the database and stored features to obtain the current car's position and posture.
Each of the three types of positioning technologies has its advantages and disadvantages. The first type of GNSS positioning is to complete positioning through GNSS signal reception. The advantages are global, all-weather, full-time high-accuracy centimeter-level positioning. The disadvantage is that it depends on the number of visible satellites and is susceptible to electromagnetic environment. Interference, multipath effects, etc.; second type of inertial positioning, using inertial measurement units (gyro and accelerometer) to measure the carrier's angular motion and linear motion parameters with respect to inertial space, and to obtain carrier speeds and positions through inertial navigation. The advantage is that the output frequency is very high (greater than 100Hz), and the short-term accuracy is high. The disadvantage is that the error accumulates over time, and the high-performance IMU is expensive; the third type of point cloud positioning, laser point cloud positioning needs to make a map in advance, Then the real-time point cloud and map are used to calculate the position and attitude of the laser radar. Then the position and attitude of the IMU are obtained through the external parameters between the laser radar and the IMU. The advantage is that it can work without GNSS. The stickiness is better, the disadvantage is that maps need to be prepared in advance while updating the map regularly (the environment will change), rain and snow Will be affected (refraction higher recovery point cloud data becomes less).
Baidu Apollo2.0 multi-sensor fusion positioning system

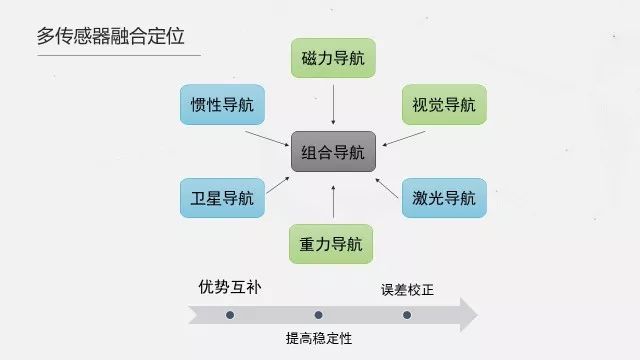
Based on the above three positioning technologies, Baidu proposed a multi-sensor fusion positioning system that not only achieves complementary advantages, but also improves stability and enhances positioning accuracy.

(Photos from the Internet)
The image above shows the Baidu unmanned vehicle. The GNSS positioning and inertial measurement unit is provided by NovAtel. The IMU is NovAtel IMU-IGM-A1 and the GNSS receiver is NovAtel ProPak6. It forms a NovAtel SPAN-IGM-A1 split-type integrated navigation system. With the highest frequency of 200Hz, real-time high-precision, high-reliability 3D position, velocity, and attitude information are output as Apollo's recommended reference hardware unit.
The NovAtel SPAN integrated navigation system has three major advantages that make it ideal for smart driving applications.
SPAN® Technology
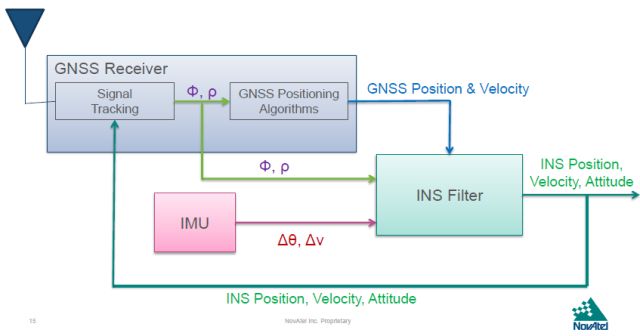
SPAN® technology is a high-precision GNSS and IMU deep-coupled integrated navigation technology from NovAtel. It complements GNSS satellite navigation technology and INS inertial navigation technology. It can ensure the continuous use of INS data in less than 4 satellite signals. The high-accuracy position, velocity, and attitude information also ensures that the INS system can be corrected using GNSS data to continuously output high-precision position information and attitude information when the INS system error becomes large.
Interference Toolkit (ITK)
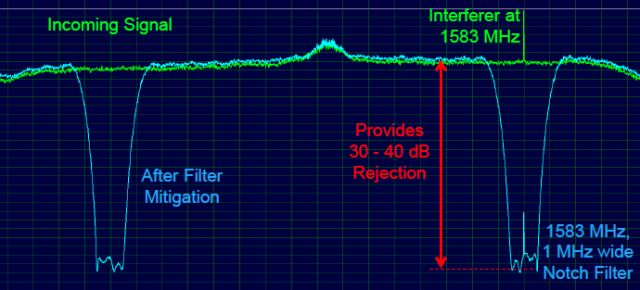
Interference Toolkit (ITK) is a new interference suppression technology from NovAtel OEM7. Nowadays complex electromagnetic environment or other electronic devices are easy to interfere with GNSS signals. ITK technology uses monitors and filtering algorithms to effectively quantify and reject interference signals and avoid navigation. Solving performance is affected.

NovAtel PwrPak7D-E1 integrated
MEMS integrated navigation system
NovAtel PwrPak7D-E1 Integrated MEMS Integrated Navigation System with SPAN Deep-Integrated Integrated Navigation Algorithm Supports SPAN Land Vehicle Land Vehicle Technology, ITK Interference Suppression Technology, 555 GNSS Signal Tracking Channels, Supports GPS, Glonass, Beidou, Gaileo Systems Multi-frequency solution, support RTK and Terrastar star station differential technology, built-in WiFi and 16GB storage, support dual antenna and wheel speed sensor function, has a rich communication interface, serial port, USB, CAN, Ethernet, etc., easy to install and integrate customers.
SPAN Land Vehicle Land Vehicle Technology
The SPAN Land Vehicle land vehicle technology is a product of NovAtel's OEM7 generation. Based on the SPAN technology, it utilizes the vehicle motion model and patented antenna phase detection technology to perform scenarios such as low speed, urban canyon, and long-term unlocking scenarios for ground wheeled vehicle applications such as smart driving. A large number of optimizations, significantly improving navigation performance, satisfying high-precision positioning requirements, and improving the accuracy of IMU devices through algorithm improvement are suitable for the trend of smart driving and cost reduction.
Nano atomization, the desktop will not be wet when humidified, and the water molecules are refined into fine particles, which are more easily absorbed by the skin. Touch button operation, press once to continuously emit fog, press twice to intermittently emit fog, different modes have different experiences. Intelligent power-off design, automatic power-off protection for water shortage, prevent dry burning, and use more assured.
Home Humidifier,Air Evaporative Humidifier,Home Ultrasonic Air Humidifier,Portable Whole House Humidifier
Dongguan Yuhua Electronic Plastic Technology Co.,Ltd , https://www.yuhuaportablefan.com