If there is no navigation on the phone or in the car, most people will be unable to move. Our reliance on navigation technology makes it difficult to imagine how people recognize the road before they navigate. Undoubtedly, this technology will last forever. The technology is also undergoing continuous improvement and innovation, making positioning or destination navigation easier.
I was on a business trip in Toronto a few days ago, I want to go around the city to see around. When I was at home, I ran 3 to 5 miles around my home every day, so I wanted to find a similar distance path in this big city. Although I can also run around the nearby neighborhood for a few laps, I still took out my mobile phone to see if I could find a beautiful path along the way.
I took out my phone and opened the map. After about two seconds I found a perfect path. The entire path has 15 turns and finally returns to the hotel where I stayed. I put the phone back in the armband and started running, but I quickly realized that I needed to look at the map to determine the direction of the next turn. Therefore, I took the phone out, looked at the direction, and then started running, but no longer put the phone back in the armband.
Since it is always swaying, it is not easy to watch the phone while running. When I was running, my hands were swaying and I couldn't see the direction of the next turn. My mobile phone doesn't have a mobile phone case, so holding a mobile phone is a bit of a headache, especially the hard sidewalk under my feet. It's too bumpy.
As I ran, I thought there must be a better way to solve my navigation problems. Will it be audio? No, no, I need a headset like this. I don't want to be hit by a car when crossing the road. Video method, I don't want to always stare down at the phone. So what's left is tactile feedback or vibration feedback?
I didn't happen to accidentally think of vibration feedback as a possible solution. In fact, I am working in TI's tactile feedback product group. However, when I realized that tactile feedback would be the ideal solution to the problems I encountered while running (in general, the problems encountered while navigating), it still gave me a lot of inspiration.
Tactile sensation is an ideal choice for alerting people when other sensations are occupied, or to enhance audio or visual feedback. Here are some great features you can implement with haptic feedback:
â—Use the clear vibration to remind the user to turn left or right
â— Remind users when they have reached mileage
â— Help the user maintain pace or rhythm by providing a vibrating metronome (I might use this feature)
â— Remind users when they receive a text message or have a call
â— Even a clear beep will remind the user that they should exercise.
There are many ways to use haptic feedback to provide navigational cues. Think about the vibration feedback inside the shoes while walking or running (Figure 1). When you reach the turn, the shoes on your left or right foot will tell you the next direction. This is very useful for runners, climbers, hikers, cyclists, and even tourists in unfamiliar cities like me, who need to know where to go in the process of constant exercise. Tactile feedback applications such as these can also help visually impaired people to easily walk around big cities.
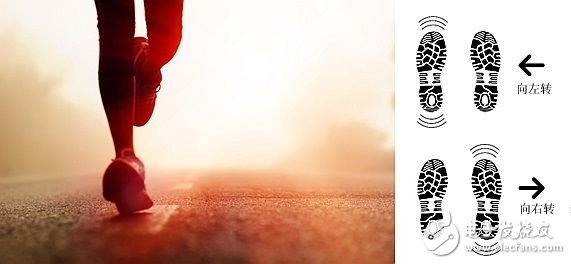
Figure 1. Example of a tactile feedback application used in shoes
Don't like running? The bicycle can also indicate the direction (Figure 2). Several companies are investigating how to integrate electronic components into bicycles. The primary means of communication between the bicycle and the rider is tactile feedback. The bike is interconnected with your phone and tells you the direction by the left and right handlebars or the beep on the seat. Your hand does not have to leave the handlebar at all, very convenient. When you are riding fast, you definitely don't want to take out your phone to see the direction, so let the bike tell you where you are going. If you do further functional expansion, the same buzzer handlebar can remind you of miles, speed cadence, and even text messages from friends.

Figure 2. Example of the use of tactile feedback in a bicycle handlebar
There are many other uses for tactile feedback in navigation. A special purpose is to support the tactile feedback belt, which provides intermittent navigation tips for soldiers wearing this belt in a noise-sensitive environment. When soldiers can't talk, they can use tactile feedback to communicate. The tactile feedback prompt can be a GPS-based local navigation direction, a more complex communication between two soldiers or a group of soldiers, or even a vibration feedback that the remote robot collides with obstacles to avoid. You can take a look at the active belt project sponsored by the Defense Advanced Research Projects Agency (DARPA).
For assistive applications, haptic feedback can be used as a virtual crutches for the visually impaired. The distance sensor can sense the object in front of the user, and the tactile feedback will provide the distance between the object and the user. The haptic feedback also provides left and right navigation commands when connected to the navigation function on the smartphone.
Tactile navigation system
So what does this system look like? The system consists of two main components: a navigation device and a tactile user interface (Figure 3). A smart watch, smartphone, or dedicated navigation device can be used to generate navigation commands. These commands are mapped to specific brakes (for example, left and right handlebars), as well as specific haptic effects (such as triple beeps for sharp turns) that are then passed through Bluetooth to the Bluetooth microcontroller (MCU). The Bluetooth MCU interprets the received effects and then triggers the haptic driver to generate the correct haptic vibration.
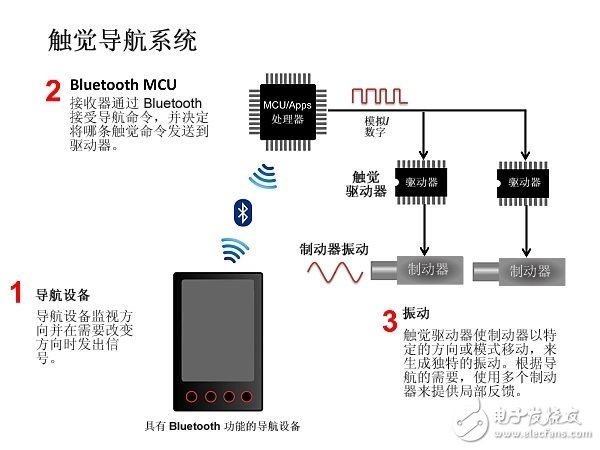
Figure 3. Block diagram of the haptic feedback system
In addition to the haptic feedback block, a processor or microcontroller, a haptic feedback driver, and a brake are required. There are many types and types of brakes. To help narrow down the choices, the following summarizes the key parameters to consider when selecting a brake.
• Brake Type—There are two main types of vibration brakes: Centrifugal Rotating Mass Motor (ERM) and Linear Resonant Actuator (LRA).
o ERM is a traditional motor with eccentric mass. When a DC voltage is applied, the eccentric mass begins to rotate to generate a force.
o LRA is a spring mass system in a metal enclosure. These systems are often used in smartphones because they not only generate strong vibrational forces, but also quickly respond to applied voltages. This also enables the LRA to produce click and complex amplitude modulation effects.
â— Acceleration - By measuring the acceleration, the vibration force generated by the brake during the movement can be calculated. Higher acceleration is important for the user's appeal to the product. For applications such as bicycle handlebars, larger brakes should be used. To measure the performance of the brakes in your system, use an off-the-shelf accelerometer. Figure 4 shows the different sizes of ERM brakes in 3 and their measured accelerations. The unit of acceleration is G, which is equal to the standard acceleration of the Earth's surface caused by gravity, or expressed as 9.8m/s2.

Figure 4. Comparison of ERM size and acceleration
â— Mounting - Brakes come in many different shapes and sizes, but the real trick is how to install them in the system. There are mainly 3 installation technologies for ERM (Figure 5).
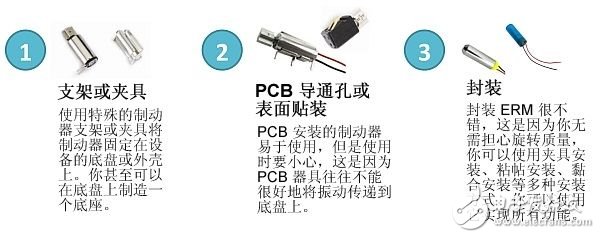
Figure 5. ERM installation options
Here you can look at the packaged motors from Precision Microdrives. For LRA, the implementation is a bit simpler. The LRA is fully encapsulated so the brakes can be glued or fixed to almost any surface. In addition, these devices can be sewn into the garment by designing several small pockets on the tactile feedback belt, vest or shirt (Figure 6). This can also be achieved through ERM.

Figure 6. Clothes with LRA brakes
After selecting a brake, you will need to select a drive. Because it generates a haptic waveform, the role this drive plays is important. It is responsible for generating the language that communicates with the user through touch. To achieve this, the driver generates different modes of vibration by varying the amplitude and frequency of the output waveform.
Let's take a look at the Texas Instruments DRV2605L ERM and LRA drivers, which embed 123 different tactile waveforms in the chip. This device generates a tactile language for you. You just need to integrate it and say it out loud! Embedded waveforms can be combined with sequences to achieve a more varied haptic effect. It is available in a very small 1.5mm x 1.5mm BGA chip scale package, or a slightly larger 3mm x 3mm lead package, which is considered to be easier to solder. Both packages require only two external components: a 1μF bypass capacitor and a 1μF internal voltage regulator capacitor.

Figure 7. DRV2605 ERM and LRA haptic driver
The last component in the system is the processor. The Bluetooth processor is responsible for communication between the navigation block and the haptic user interface. There are many different options for this device, but I recommend the SimpleLink Bluetooth low power (Bluetooth Smart) CC2541 microcontroller. We have recently used this device in a project to generate a reference design for a tactile wearable device and found this device to be very useful in all applications that require haptic feedback prototyping. Check out the Tactile Bluetooth Kit Reference Design - it even includes an iPhone and iPod app!
Iron Battery,Nife Batteries Australia,Nife Battery 600Ah For Asutralia,Ni-Fe Battery 450~600Ah
Henan Xintaihang Power Source Co.,Ltd , https://www.taihangbattery.com